Page not found!
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
Contact
Published:
Summary of the post that is teased.
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
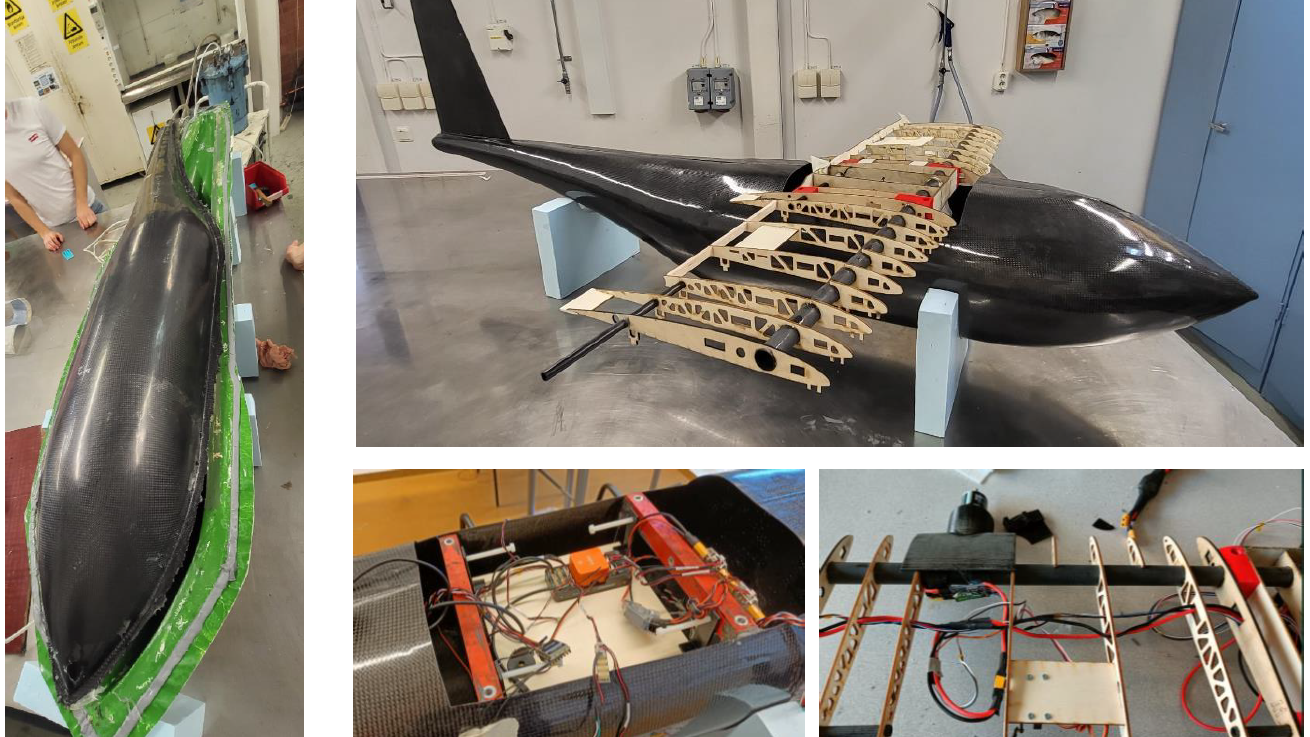
Design of an autonomous high altitude long endurance UAV to study optical phenomena in the upper atmosphere using scientific imaging instruments. Project under the KTH Space Physics department. Paper presented at ICAS 2022.

Scalable multi-agent reinforcement learning for formation control with collision avoidance. This work was my Master’s Thesis while at KTH Royal Institute of Technology.

Implemented a ROS based linear temporal logic (LTL) planner for the CANOPIES ERC: Collaborative Paradigm for Human Workers and Multi-Robot Teams in Precision Agriculture Systems.


Published in International Council of the Aeronautical Sciences (ICAS), 2022
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.