LTL for CANOPIES
Implemented a ROS based linear temporal logic (LTL) planner for the CANOPIES ERC: Collaborative Paradigm for Human Workers and Multi-Robot Teams in Precision Agriculture Systems.



Implemented a ROS based linear temporal logic (LTL) planner for the CANOPIES ERC: Collaborative Paradigm for Human Workers and Multi-Robot Teams in Precision Agriculture Systems.
Scalable multi-agent reinforcement learning for formation control with collision avoidance. This work was my Master’s Thesis while at KTH Royal Institute of Technology.

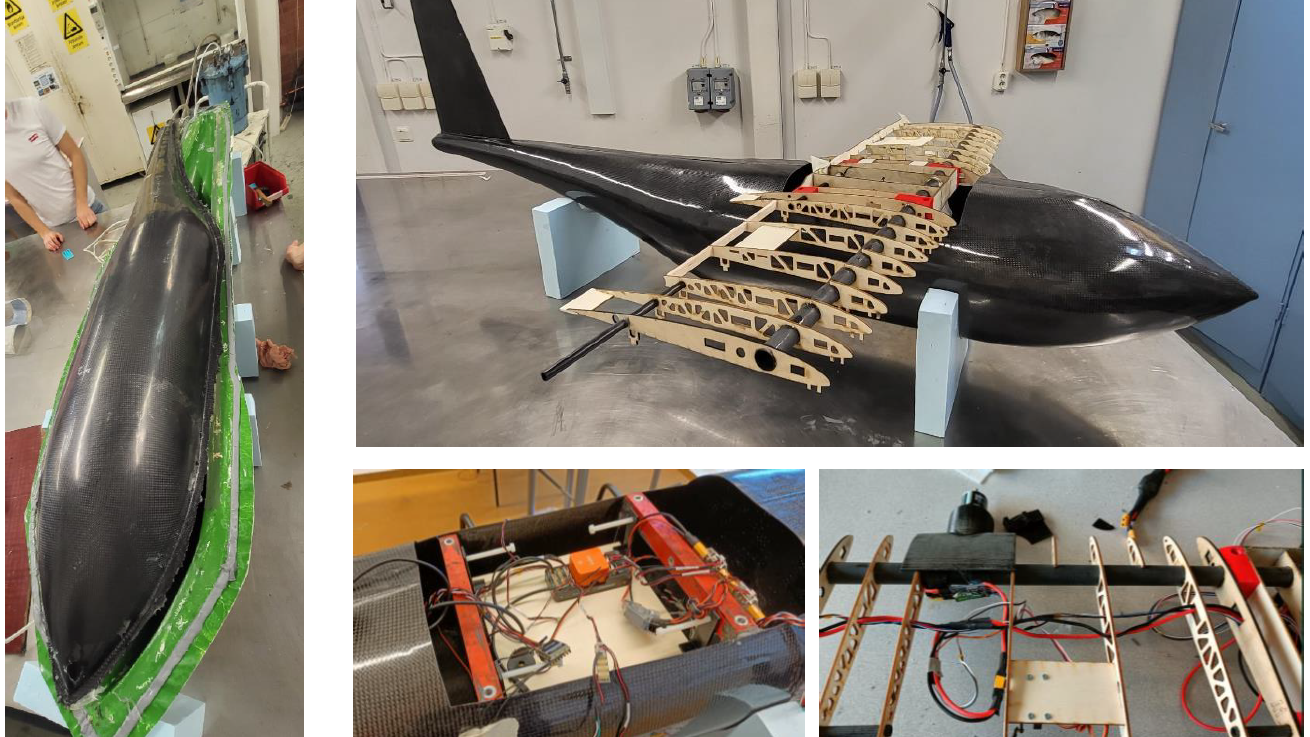
Design of an autonomous high altitude long endurance UAV to study optical phenomena in the upper atmosphere using scientific imaging instruments. Project under the KTH Space Physics department. Paper presented at ICAS 2022.