Publications
2025
C4.
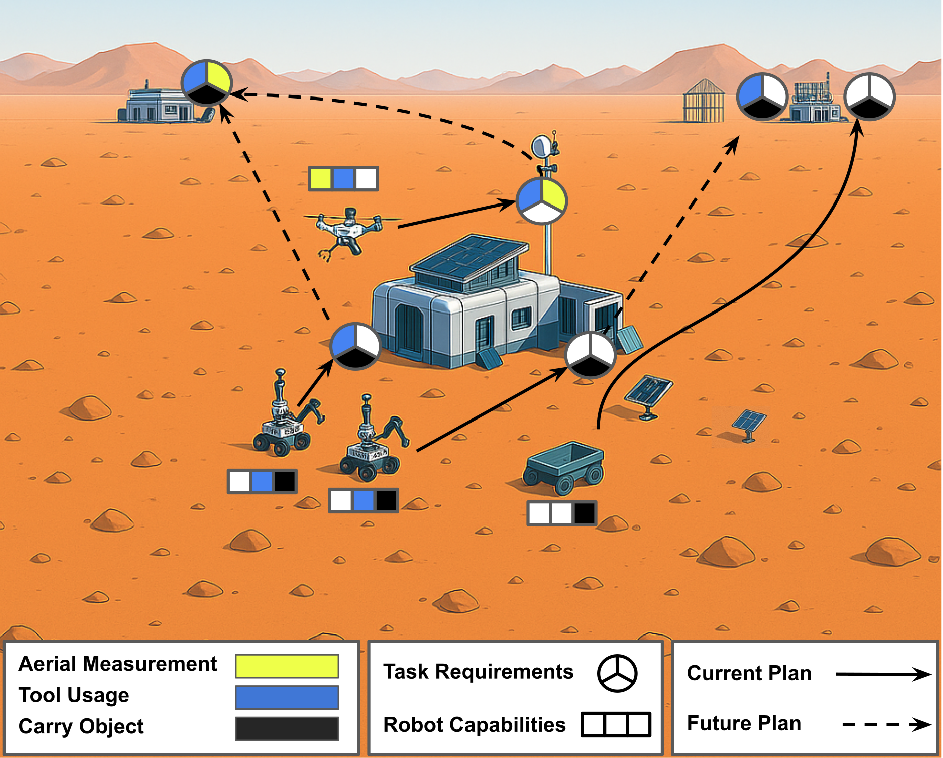
SADCHER: Scheduling using Attention-based Dynamic Coalitions of Heterogeneous Robots in Real-Time
Jakob Bichler
,
Andreu Matoses Gimenez
,
Javier Alonso-Mora
.
In IEEE Int. Symposium on Multi-Robot & Multi-Agent Systems (MRS),
2025.
Multi-robot task allocation in heterogeneous systems requires efficient scheduling methods that can handle dynamic environments and diverse robot capabilities. This paper presents SADCHER, a novel attention-based approach for scheduling dynamic coalitions of heterogeneous robots in real-time. Our method leverages deep reinforcement learning and attention mechanisms to enable scalable and adaptive task assignment across robot teams with varying capabilities. The approach is validated through extensive simulations and demonstrates significant improvements in task completion rates and system efficiency compared to baseline methods.
C3.
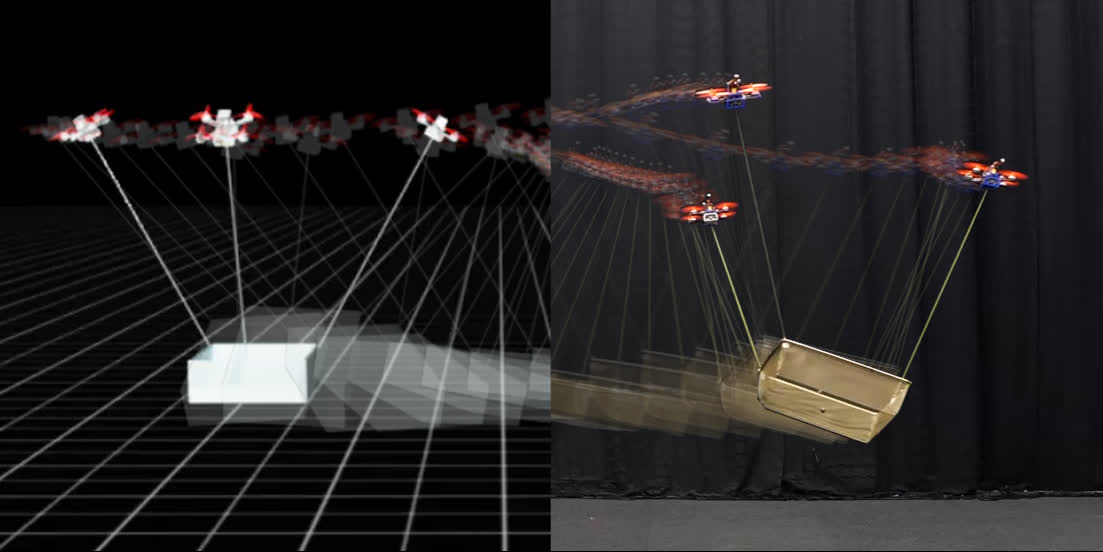
Decentralized Aerial Manipulation of a Cable-Suspended Load Using Multi-Agent Reinforcement Learning
Jack Zeng
,
Andreu Matoses Gimenez
,
Eugene Vinitsky
,
Javier Alonso-Mora
,
Sihao Sun
.
In Conference on Robot Learning (CoRL),
2025.
This paper presents the first decentralized method to enable real-world 6-DoF manipulation of a cable-suspended load using a team of Micro-Aerial Vehicles (MAVs). Our method leverages multi-agent reinforcement learning (MARL) to train an outer-loop control policy for each MAV. Unlike state-of-the-art controllers that utilize a centralized scheme, our policy does not require global states, inter-MAV communications, nor neighboring MAV information. Instead, agents communicate implicitly through load pose observations alone, which enables high scalability and flexibility. It also significantly reduces computing costs during inference time, enabling onboard deployment of the policy. In addition, we introduce a new action space design for the MAVs using linear acceleration and body rates. This choice, combined with a robust low-level controller, enables reliable sim-to-real transfer despite significant uncertainties caused by cable tension during dynamic 3D motion. We validate our method in various real-world experiments, including full-pose control under load model uncertainties, showing setpoint tracking performance comparable to the state-of-the-art centralized method. We also demonstrate cooperation amongst agents with heterogeneous control policies, and robustness to the complete in-flight loss of one MAV.
2024
C2.
Enhancing Precision Agriculture through Human-In-The-Loop Planning and Control
Shankar Deka
,
Sujet Phodapol
,
Andreu Matoses Gimenez
,
Victor Nan Fernandez-Ayala
,
Rufus C. Y. Wong
,
Pian Yu
,
Xiao Tan
,
Dimos V. Dimarogonas
.
In IEEE 20th International Conference on Automation Science and Engineering (CASE),
2024.
In this paper, we introduce a ROS based framework designed for the planning and control of robotic systems within the context of precision agriculture, with an emphasis on human-in-the-loop capabilities. Utilizing Linear Temporal Logic to articulate complex task specifications, our algorithm creates high-level robotic plans that are not only correct by design but also adaptable in real time by human operators. This dual-focus approach ensures that while humans have the flexibility to modify the high-level plan on-the-fly or even take over low-level control of the robots, the system inherently safeguards against any human actions that could potentially breach the predefined task specifications. We demonstrate our algorithm within the dynamic and challenging environment of a real vineyard, where the collaboration between human workers and robots is critical for tasks such as harvesting and pruning, and show the practical applicability and robustness of our software. This work marks a pioneering application of formal methods to complex, real-world agricultural environments.

W1.
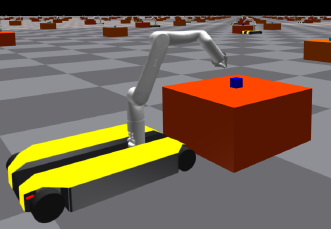
Physically Grounded Optimal Realizations of Symbolic Plans
Andreu Matoses Gimenez
,
Nils Wilde
,
Chris Pek
,
Javier Alonso-Mora
.
In Robotics: Science and Systems (RSS), Workshop on Frontiers of Optimization for Robotics,
2024.
Robot autonomy often involves planning high-level discrete decisions and continuous motion planning to realize each decision. Task and Motion Planning (TAMP) algorithms solve these hybrid problems jointly while considering constraints between the discrete symbolic actions, i.e., the task plan, and their continuous geometric realization. Previous TAMP algorithms have mostly focused on computational performance, completeness, or optimality. However, due to the required simplifications and abstractions, the resulting plans often do not account for robot dynamics, nor complex contacts. They also often ignore the effect of the low-level controllers on the optimality and/or feasibility of the plan's realizations. This work investigates the use of a parallelized physics simulator to compute realizations of the plan with a motion controller, realistic dynamics, and considering contacts with the environment. Using cross-entropy optimization, we sample the parameters used by the controllers, or actions, to obtain low-cost solutions. The resulting realized plan is straightforward to implement in the real system, as the robot uses the same controllers. We test our approach for a pick and place task, where our method is capable of finding low-cost feasible solutions in 1-2 min.
2023
T1.
Scalable Reinforcement Learning for Formation Control with Collision Avoidance
Andreu Matoses Gimenez
,
Ingvar M. Ziemann
,
Alexandre Proutiere
.
In Master Thesis, KTH Royal Institute of Technology,
2023.
In the last decades, significant theoretical advances have been made on the field of distributed mulit-agent control theory. One of the most common systems that can be modelled as multi-agent systems are the so called formation control problems, in which a network of mobile agents is controlled to move towards a desired final formation. These problems additionally pose practical challenges, namely limited access to information about the global state of the system, which justify the use distributed and localized approaches for solving the control problem. The problem is further complicated if partial or no information is known about the dynamic model of the system. A widely used approach for model free control is reinforcement learning (RL). A fundamental challenge of this approach in this setting is that the state-action space size scales exponentially with the number of agents, rendering the problem intractable for a large networks. This thesis presents a scalable and localized reinforcement learning approach to a traditional multi-agent formation control problem, with collision avoidance. A scalable reinforcement learning advantage actor critic algorithm is presented, based on previous work in the literature. Sub-optimal bounds are calculated for the accumulated reward and policy gradient localized approximations. The algorithm is tested on a two dimensional setting, with a network of mobile agents following simple integrator dynamics and stochastic localized policies. Neural networks are used to approximate the continuous value functions and policies. The formation control with collisions avoidance formulation and the algorithm presented show good scalability properties, with a polynomial increase in the number of function approximations parameters with number of agents. The reduced number of parameters decreases learning time for bigger networks, although the efficiency of computation is decreased compared to state of the art machine learning implementations. The policies obtained achieve probably safe trajectories although the lack of dynamic model makes it impossible to guarantee safety.
2022
C1.
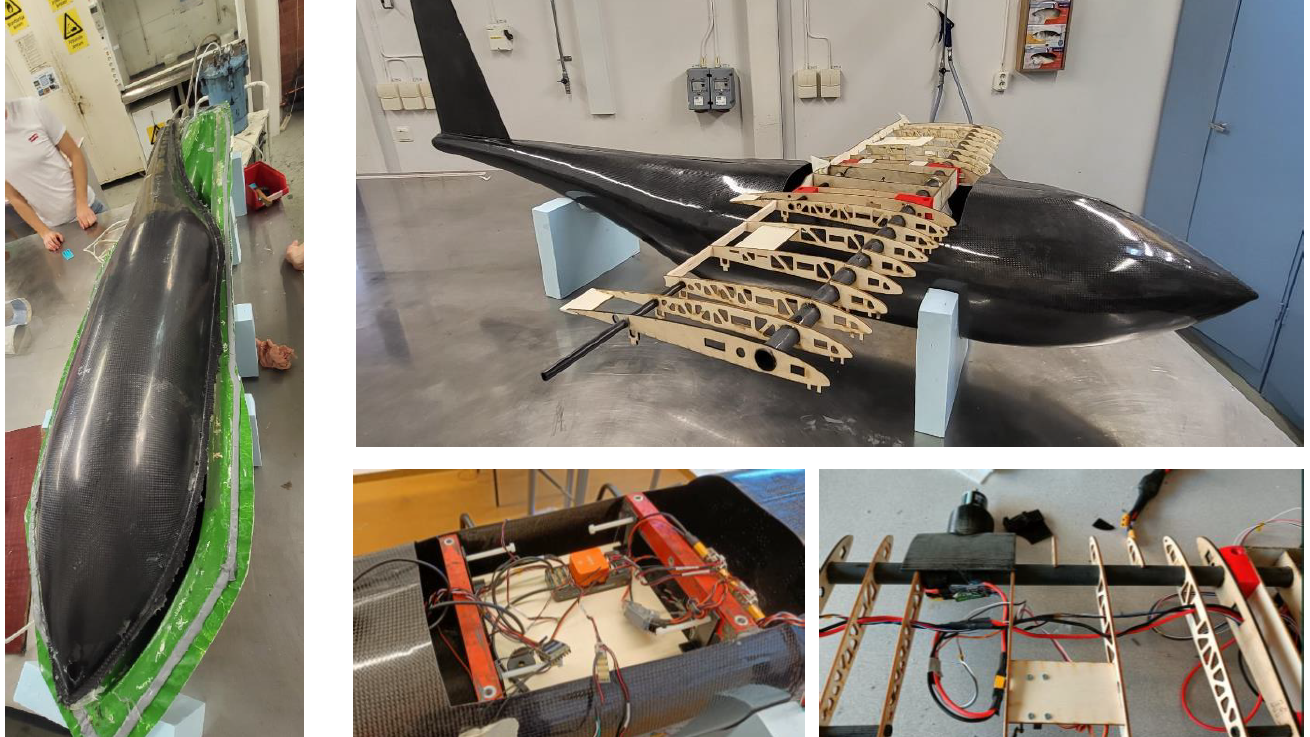
Design of a HALE UAV for Atmospheric Imaging
Victor Nan Fernandez-Ayala
,
László Vimláti
,
Andreu Matoses Gimenez
,
Helena Delmotte
,
Mykola Ivchenko
,
Raffaello Mariani
.
In International Council of the Aeronautical Sciences (ICAS),
2022.
Optical phenomena in the upper atmosphere, such as northern lights, airglow, noctilucent clouds and thunderstorm-related transient luminous phenomena reveal the complex processes coupling different layers of the atmosphere and the near earth space. Bad weather and lighting conditions, as well as geographical constraints, limit the possibilities of ground based imaging. Therefore, an autonomous high altitude long endurance (HALE) fixed-wing unmanned aerial vehicle (UAV ) is proposed for atmospheric imaging, as a joint student-driven research project between the Aeronautics and Vehicle Engineering- and the Space and Plasma Physics departments at KTH Royal Institute of Technology. The Autonomous Light Platform for High Altitude atmospheric imaging (ALPHA) is specifically designed for operations in the environmentally harsh conditions found in Arctic night time.